Date: April 24, 2018
Morning session: 9:00 – 13:00 with a coffee break from 10:30 – 11:00
Abstract
One of the outstanding obstacles to exploring the challenges of the emerging field of soft robotics is the relative lack of low-cost entry-level investigative model systems. The purpose of this workshop is to introduce tensegrity structures as a compelling substrate for soft robotics research. Tensegrities are relatively simple to design and fabricate, and yet they present all the same challenges and pathologies of more conventionally soft robots. Most valuably, they are incredibly modular, requiring few few distinct parts, and allowing them to scale quite well in complexity. This workshop will provide participants with an overview of tensegrity structures and tensegrity-based robotics, and then provide participants with a hands-on experience building and controlling tensegrity-based soft robots.
Description
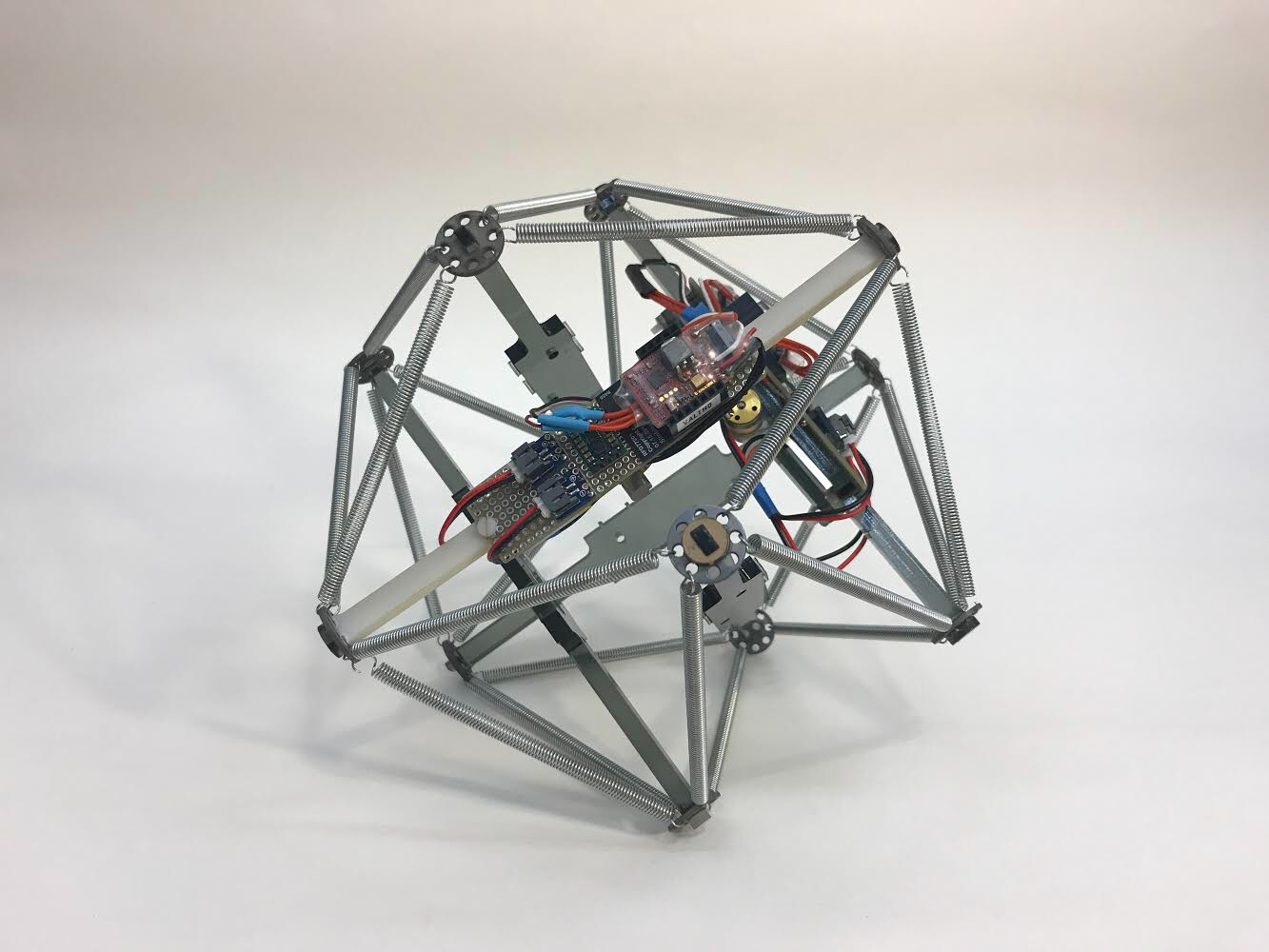
Tensegrities are relatively simple mechanical systems, consisting of a number of rigid elements (struts) joined at their endpoints by tensile elements (cables or springs), and kept stable
through a synergistic interplay of pre-stress forces. Beyond engineering, properties of tensegrity have been demonstrated at all scales of the natural world, ranging from the tendinous network of the human hand to the mechano-transduction of living cell. At every scale, tensegrity structures have an impressive strength-to-weight ratio, are structurally robust, and stable in the face of deformation.
When suitably supple spring constants are chosen, tensegrities can be used to construct structures which act as soft robots: One significant advantage of tensegrities is that, unlike many other soft robots, tensegrity structures are inherently modular (consisting of only struts and springs). This means that increasingly complex tensegrity structures can be constructed simply by increasing the number of corresponding struts and springs. Moreover, tensegrities can be relatively easy (but not entirely simple) to construct. They are simple enough to be baby toys and complex enough to serve as the basis for the next generation of NASA’s planetary rovers. Tensegrity structures are therefore a compelling and low-cost platform with which to explore the fundamental and intertwined challenges of soft robotic design and control, where small changes to a robot’s material properties can have profound and non-linear effects upon its behavior.
Recently, several independent research groups have been promoting soft robotics research built around these simple modular systems. The purpose of this workshop is to provide participants with an overview of tensegrity structures and tensegrity-based robotics, and then provide participants with a hands-on experience building and controlling tensegrity-based soft robots.
Organizers

List of Speakers
- Davide Zappetti (EPFL) – confirmed
- John Rieffel (Union College) – confirmed
- Valter Böhm (TU Ilmenau) – confirmed
- Vishesh Vikash (University of Alabama)
Tentative schedule
Welcome and Introduction to Tensegrity (20 – 30 minutes): in which we welcome participants, describe the workshop, and then introduces tensegrity structures, preliminary theory and properties relevant to soft robotics. To be followed by a more detailed discussion of their usage and possible applications in different robotic fields or different fields in general.
Applications: 1 – 2 talks (15 minutes each): featuring interesting emerging applications of soft tensegrity robots.
Introduction to Modular Tensegrity Robots: (15 minutes each): talks from people presenting the kits for the hands-on component on the tensegrity workshop
Hands-on Workshop: (3 – 4 hours): time in which participants to play with the kits, and learn the challenges and excitement of building modular tensegrity robots and discovering means of making them behave in interesting ways.