UMOBILITY PROJECT
Goals and Performance Criteria
With feedback from the Kevin G. Langan School and in-person observations of first prototype (Version 1.0), we approached UMobility (Version 2.0) with the following design goals and performance criteria:
Improved Design
One of our goals is to improve the existing prototype with feedback from the Langan school.
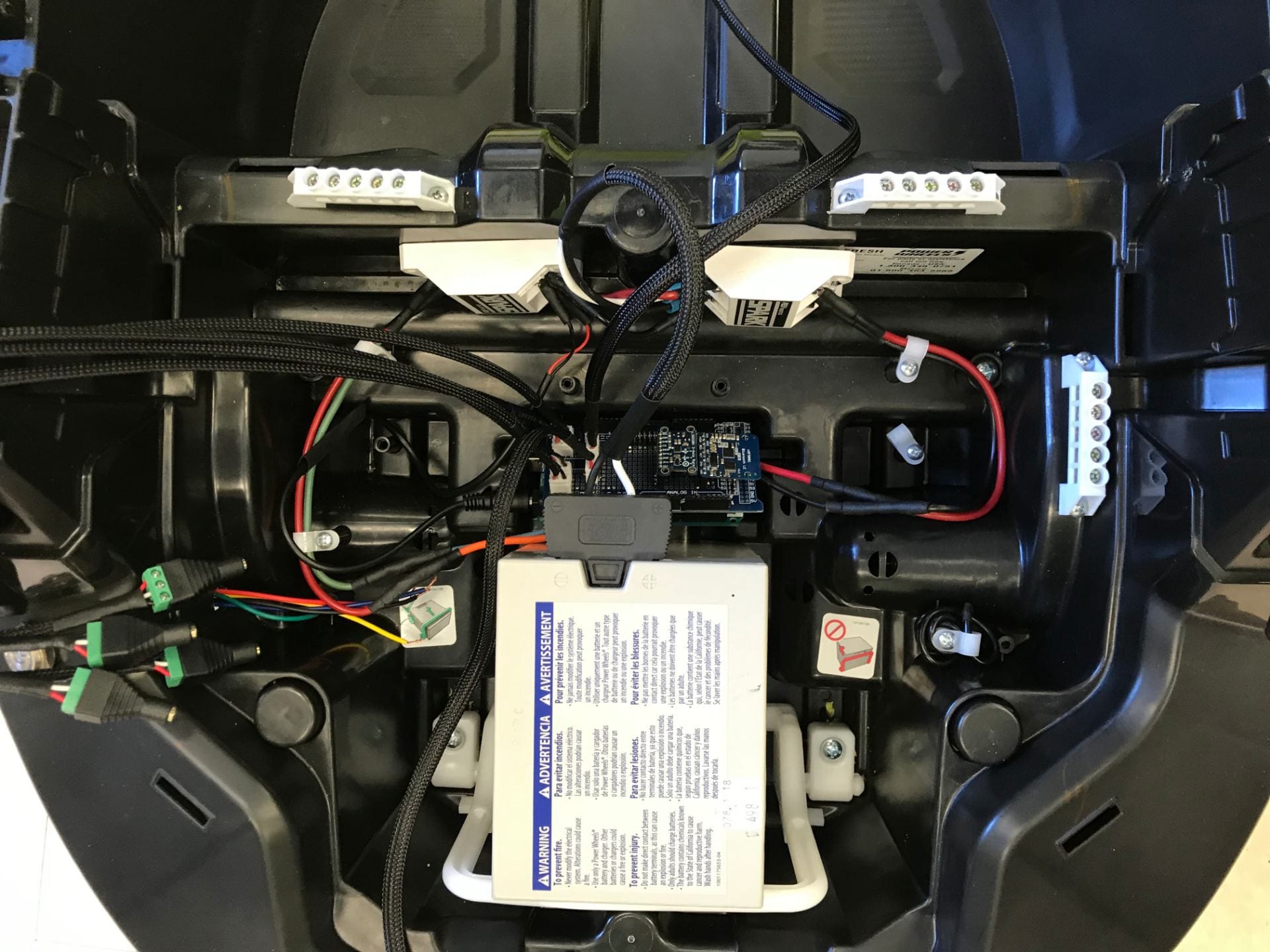
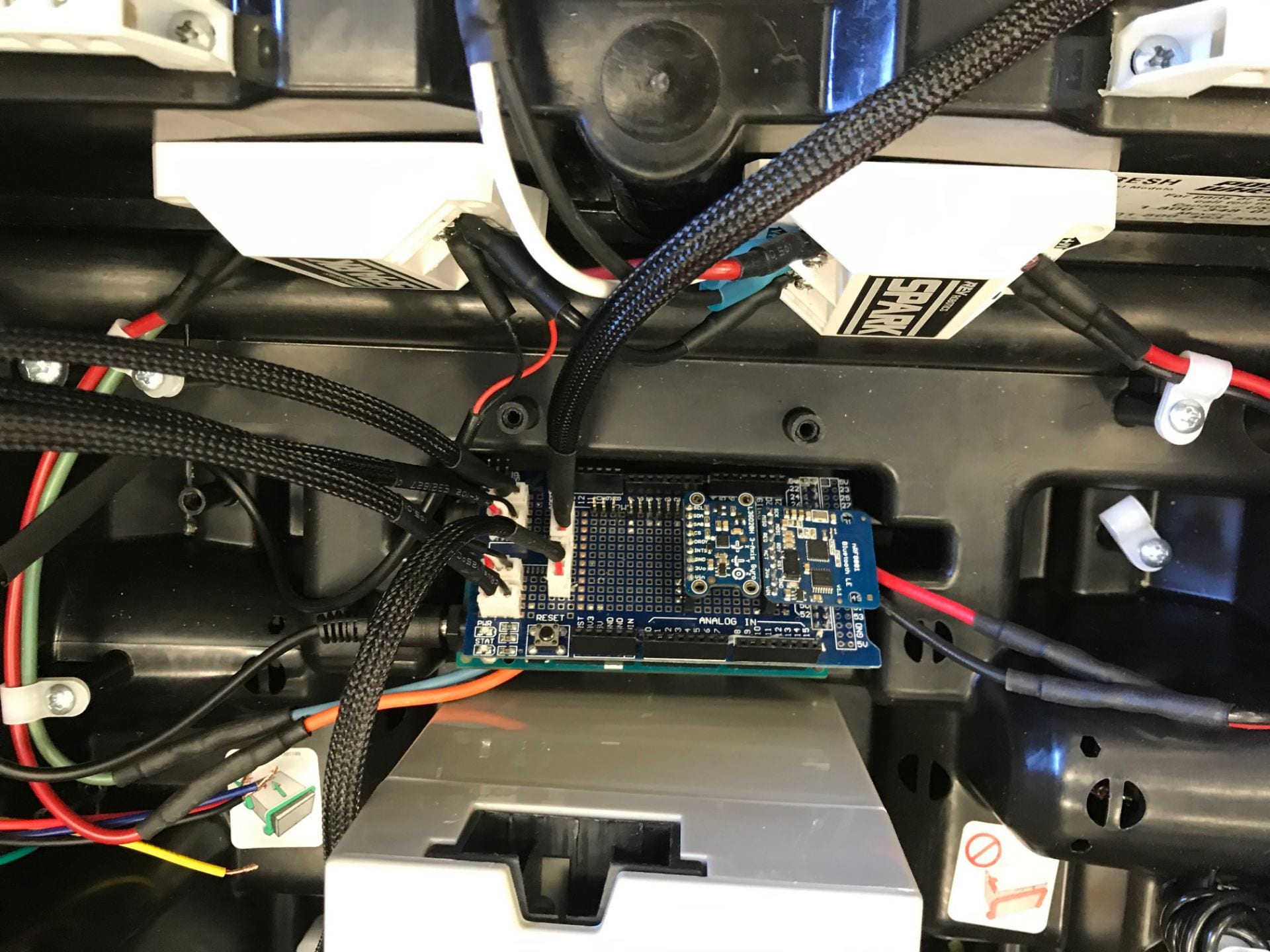
Minimally Invasive
To make UMobility easily replicable, it is important that the process of retrofitting the Wild Thing is as minimally invasive as possible.
Easy to Build
Cost Effective
Durable
It is important to us that the structure, control system, and peripheral devices are durable and easily maintainable.
Easy to Use
Accurate Movement
UMobility corrects the veering of our first prototype and provides accurate movement.
More Features
Supports System Diagonsis
As a preventative measure, a system diagnostic software is prototyped to allow users to debug individual hardware components and features.
Truly Open Source
The end goal of the UMobility Project is to turn a one-time senior thesis into an easily replicable, open source product. This website is built with the intention to provide a one-stop shop for replicating a high quality low-cost wheelchair for children.