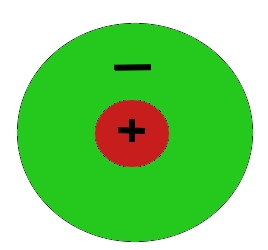
In biological vision systems, light is detected by some type of cell (e.g. retinal ganglion cell) with a center-surround type visual field. All of the receptive fields have an excitatory center and an inhibitory surround. This type of interaction can be well modeled as the difference of two Gaussian (i.e. normal) distributions: a narrower positive Gaussian and a broader negative Gaussian (Wandell 1995). This produces a two-dimensional receptive field that can be viewed as the image below:
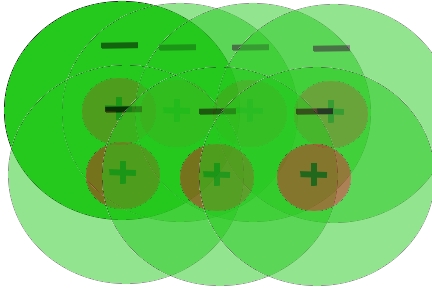
Of course, there are multiple such receptive fields in any vision system and they overlap to cover the surface of the visual field, which means that each individual cell will be integrated as part of many center-surround fields.

This type of filtering is used in our model as a pre-processing step, prior to motion detection. The center-surround field is created using a filter that assigns each point a value according to the weighted average of the points surrounding it, determined by two Gaussian distributions of equal area. The broader Gaussian (shown in red) is subtracted from the narrower one (shown in blue). This type of filtering is referred to as a Difference of Gaussian, or DOG filter.

The resulting filter shape after subtracting the broader “inhibitory” Gaussian distribution from the narrower “excitatory” Gaussian.

Another view.
