EvoFab started here a few years ago as Dave Sayles’s senior project, advised by John Rieffel. Since then a lot has changed about its outer and inner workings, but the overall goal has stayed the same: get a 3D printer to design objects on its own. Sayles’s tried to get his printer to make letters, and the researchers after him (Tim Kuehn and Emily Houlihan) moved on to having it design arches.
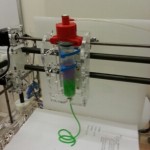
I took over the project this past Spring and so far I’ve not done any evolving yet, but instead have been implementing an important change to the machine. The original way to extrude the gel was by twisting the top on the syringe, which was inconsistent enough to warrant a change. We built a pneumatic system using two solenoids and an arduino which tells the solenoids to open or close their valves. Originally this system couldn’t run for more than a few seconds, because when the relays were left open the solenoid went through a radical voltage change. This would reset the arduino, changing its USB port I.D. Because we depended on that I.D. staying the same, we put in diodes across each of the solenoids. To prove that this got rid of our problem and the system can run again, I wrote a python program that simulates real extruding by telling the solenoids to open and close in realistic time intervals, and after running this multiple times, trying faster or slower resetting times, we didn’t see the failure we had seen before. Still, it extrudes too slowly to collect good data with. We’re going to spend the next good portion of the summer experimenting with different air pressures and with materials of different viscosities to try to get the system back to evolving.