UMOBILITY PROJECT
UMobility Features
The UMobility improves its first prototype with attention to user interface and replicability. It features secure wiring, bluetooth capability, ability switch and joystick control features, a redesigned power delivery system, streamlined motor control code with proposed solutions to drive the platform straight, and a construction manual.
Obstacle Detection
Two ultrasonic sensors, placed at the front and back of the UMobility, stops the platform when obstacles are detected.
Obstacle Alert
When the ultrasonic sensors detect obstacles, the built-on buzzer is activated.
Ability Switch Drive
The UMobility can be controlled via four ability switches. They provide forward, backward, left, and right direction controls.
Joystick Drive
The UMobility can also be controlled by a joystick, which provides both proportional and non-proportional motor control.
Adaptively-tuned PID Integration
As a correction mechanism to the veering problem of our first prototype, the UMobility uses an adaptively-tuned PID motor control.
Redesigned Power Delivery System
Instead of a software implemented switch, the UMobility uses a mechanical switch to securely cut off power supply to its control system.
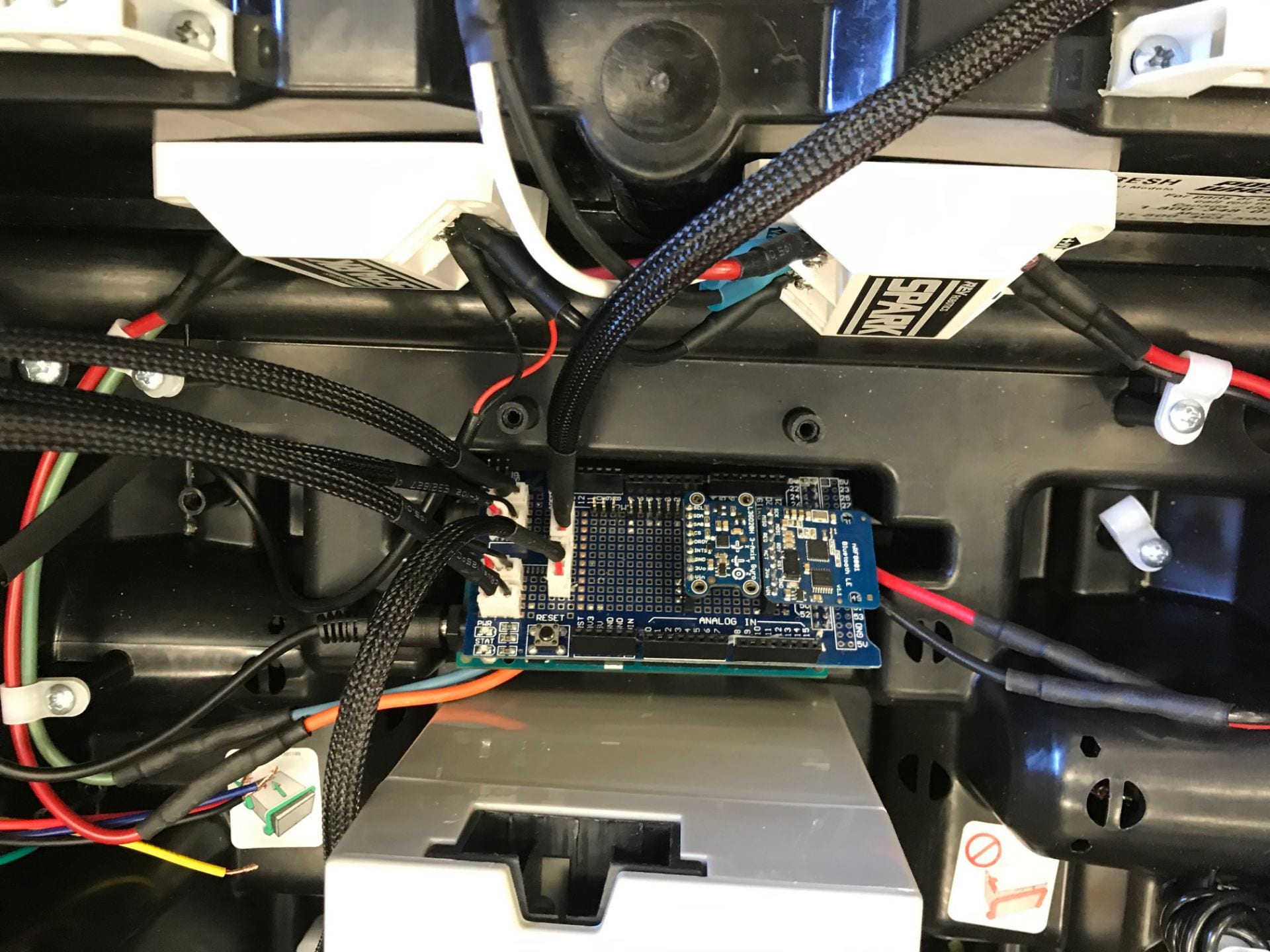
Bluetooth Capability
Our control system integrates a low energy bluetooth module, which allows for the integration of mobile apps to adjust system settings.
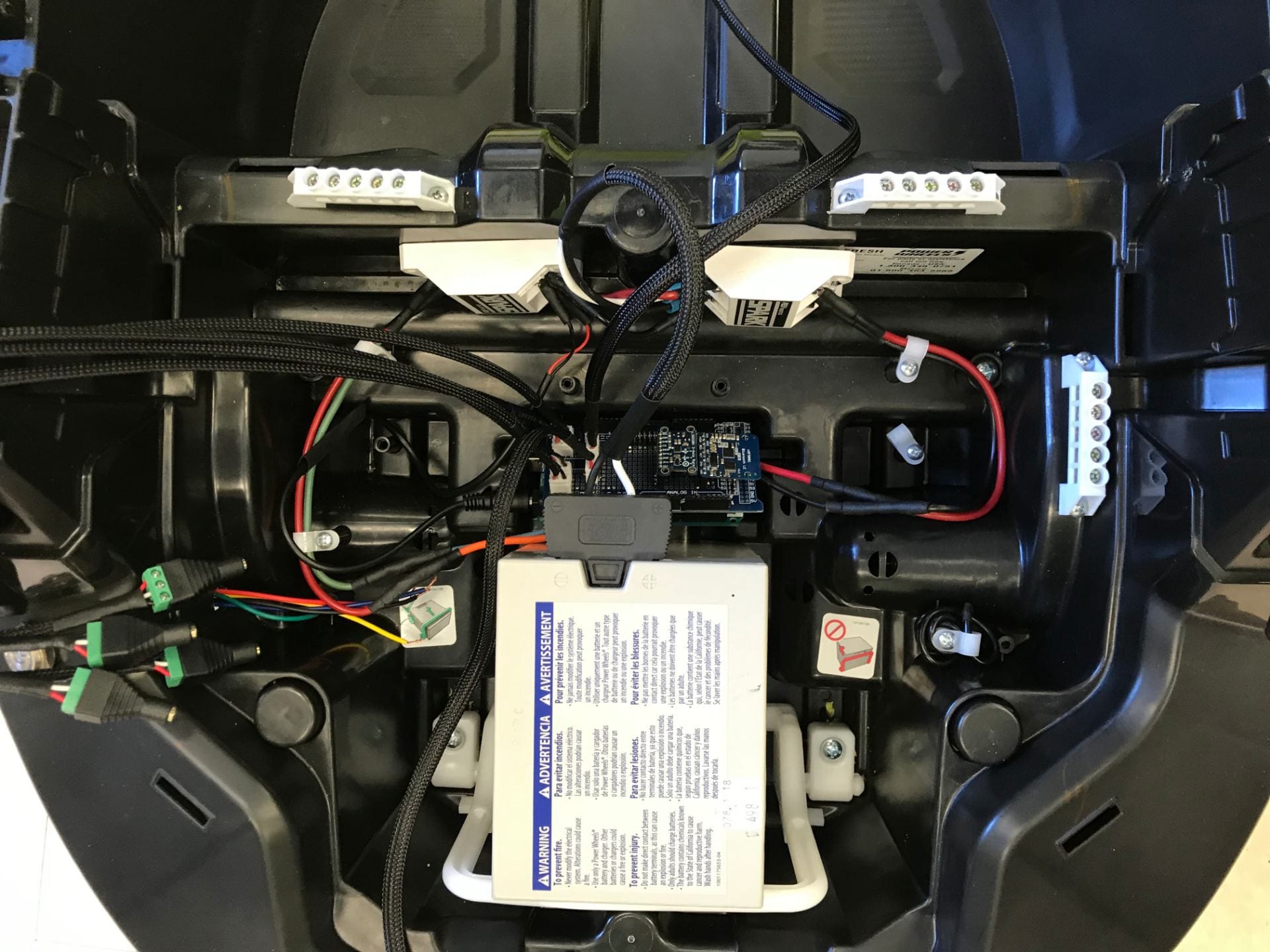
Secure Wiring
The UMobility adheres to secure wiring standards and introduces a control system breakout board to reduce the wiring footprint.
Construction Manual
A construction manual will give users step-by-step guidelines on how to replicate the UMobility.